Time behavior of a system controlled by Heaviside step functions
"step change" redirects here. For other uses, see step change (disambiguation).
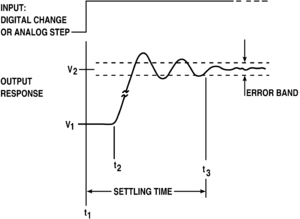
A typical step response for a second order system, illustrating overshoot, followed by ringing, all subsiding within a settling time.
The step response of a system in a given initial state consists of the time evolution of its outputs when its control inputs are Heaviside step functions. In electronic engineering and control theory, step response is the time behaviour of the outputs of a general system when its inputs change from zero to one in a very short time. The concept can be extended to the abstract mathematical notion of a dynamical system using an evolution parameter.
From a practical standpoint, knowing how the system responds to a sudden input is important because large and possibly fast deviations from the long term steady state may have extreme effects on the component itself and on other portions of the overall system dependent on this component. In addition, the overall system cannot act until the component's output settles down to some vicinity of its final state, delaying the overall system response. Formally, knowing the step response of a dynamical system gives information on the stability of such a system, and on its ability to reach one stationary state when starting from another.
The stepresponse of a system in a given initial state consists of the time evolution of its outputs when its control inputs are Heaviside step functions...
by the Greek letter τ (tau), is the parameter characterizing the response to a step input of a first-order, linear time-invariant (LTI) system. The time...
of the system. The impulse response and stepresponse are transient responses to a specific input (an impulse and a step, respectively). In electrical...
overshot. Turning to stepresponse, the stepresponse is the integral of the impulse response; formally, the value of the stepresponse at time a is the integral...
concept behind some test signals, such as those used to determine the stepresponse of a dynamical system. The rectangular function, the normalized boxcar...
Frequency response Gibbs phenomenon Küssner effect Linear response function LTI system theory Point spread function Pre-echo Stepresponse System analysis...
}}}u(t)\,,} where u(t) is the Heaviside step function and τ = RC is the time constant. Similarly, the impulse response for the resistor voltage is h R ( t...
oscillate, and to control overshoot and ringing in the amplifier's stepresponse. It is also used extensively to improve the bandwidth of single pole...
The Heaviside step function, or the unit step function, usually denoted by H or θ (but sometimes u, 1 or 𝟙), is a step function named after Oliver Heaviside...
figure, (a) represents the stepresponse of a conventional B4 vented box alignment, while (b) represents the stepresponse of a B2 closed-box alignment...
measure the charging time duration to reach that voltage threshold. This stepresponse measurement can be continually repeated (e.g. by using a square wave)...
{\displaystyle L_{d}} variable. When a voltage step is applied to an inductor, its short and long-term response are easy to calculate: In the short-time limit...
p. 22), the term "rise time" applies to either positive or negative stepresponse, even if a displayed negative excursion is popularly termed fall time...
is used as the input to a system, the output is called the stepresponse. The stepresponse shows how a system responds to a sudden input, similar to turning...
}}}u(t)\,,} where u(t) is the Heaviside step function and τ = L/R is the time constant. Similarly, the impulse response for the resistor voltage is h R ( t...
towards the same shape as filter order increases. While the time-domain stepresponse of the Gaussian filter has zero overshoot, the Bessel filter has a small...
Considerable overshoot and ringing in stepresponse, which worsens with increasing order Slightly non-linear phase response Group delay largely frequency-dependent...
than 7 HCP. Positive 2♥ – a response of 2♥ show a (semi-)positive, and 2♦ a negative (0-4 HCP) "Three Point Step" responses to a strong 2♣ opening bid...
initial small effect Stability criterion Stepresponse – Time behavior of a system controlled by Heaviside step functions W. Ross Ashby (1957). "Chapter...
the time-domain called the stepresponse, or at times in the frequency domain called the open-loop response. The stepresponse characteristics applied in...
A stepper motor, also known as step motor or stepping motor, is an electrical motor that rotates in a series of small angular steps, instead of continuously...
case of the unit step, the overshoot is just the maximum value of the stepresponse minus one. The percentage overshoot (PO) is related to damping ratio...
From a signal processing point of view, the Gibbs phenomenon is the stepresponse of a low-pass filter, and the oscillations are called ringing or ringing...
by Paul Ehrlich, were shown to be the soluble components of the innate response that leads to a combination of cellular and humoral immunity. This discovery...
 Global Information
Global Information